Page 1 of 1
Definition of Drive, Ground Speed and multiple inputs for TC

Posted:
Thu Sep 30, 2010 8:05 amby Scott@FP
Say you have an MDC and input individual wheel speeds into the ECU sensor setup, RF= R Gnd Speed (kmh) LF= L Gnd Speed (kmh) RR= R Drive Speed (kmh) LR= L Drive Speed (kmh) BUT you also have the VSS sensor on Dig1 (in MPH) for gear detection (gear detection speed input limited to DIg1-4), now when you select "Gnd Spd" as an axis, what *is* it exactly? The weighted avg between R Gnd Spd and L Gnd Spd in kmh, or DIg1 VSS in MPH? Does DIg1 VSS get ignored because Drive Speed has already been defined?
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Thu Sep 30, 2010 10:44 amby Scott@FP
OK I found the issue, it might be a firmware oopsie, its really odd. The above sounds like a silly question but there was some odd behavior that lead to it.
Some background-
MDC into M800 transmitting all 4 wheel speeds in KMH.
M800 Sensor Setup - MDC RF= R Gnd Speed (kmh), MDC LF= L Gnd Speed (kmh), MDC RR= R Drive Speed (kmh), MDC LR= L Drive Speed (kmh). All 1-to-1 KMH. Read correctly in logs.
Previously had OEM VSS (trans output) into Dig1 and calibrated in MPH. When Gnd Spd or Drv Spd displayed or in logs read in MPH, yet sensor setup/inputs/speed was defined as coming from the MDC (ECU2-1 thru 4).
Now, disabled Dig1, there is now no Gnd Spd or Drv Spd displayed (stays at zero) *if* Traction Control/setup/slip calc method is 0 (disabled), when Traction Control/setup/slip calc is changed to 1 (drv vs gnd) both Gnd Spd and Drv Spd data display and logs are functional.
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Fri Oct 01, 2010 3:23 amby Scott@FP
OK we got straightened out. Wheel Speed calcs are a function of the TC logic and if you turn TC off you lose the calcs. Seems odd but that's the way it is.
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Fri Oct 15, 2010 1:11 pmby MarkMc
Hi Scott,
This is correct, the ground speed (fastest of the two non-driven wheel speeds) and drive speed (weighted average depending on the Balance parameter in TC) are only generated when you turn on the TC slip calculation method. Yeah, its always been this way for some reason even on M4/M48, not really sure why.
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Tue Oct 19, 2010 2:14 amby Scott@FP
Thanks.
One of the reasons I ask is it appears Slip Error is always gnd spd - drive spd and slip error units are a negative number. This works peachy keen on RWD or FWD but for AWD Slip Error really needs to be Slowest Wheel - Fastest Wheel if we are to be able to use Slip Error type TC. Slip type TC is easy to understand and visualize how to set up, it would be nice to see some basics on the other TC calc methods like RoC and Gear. Webinar?
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Tue Oct 19, 2010 5:37 pmby Holmz
If you knew the chassis speed - then you base slip on chassis speed.
(Anything else is just an approximation)
However it is much more difficult to get chassis speed, without wheel speed sensors.
If the wheels are never at chassis speed, then it may be worth the bother.
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Wed Oct 20, 2010 8:22 amby Scott@FP
AWD cars don't always slip the same wheels every time, and there's really no true gnd speed reference as you pointed out. Entirely possible and fairly frequent to have all 4 wheels slipping at nearly the same rate, losing forward drive (loss of lat G)at lower speeds. AWD (fully differentiated, not progressive ala Nissan and Porsche)is more likely to slip the fronts first, but defining the fronts as Drv Spd still leaves a couple of holes in the strategy. It might work out OK, have to play with it some more, really only want to prevent one wheel from blowing off over bumps or at low speeds and briefly cut power to get it back in line. Usually what seems to happen is traction loss in one wheel leading to loss in another on the opposite axle.
Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Wed Oct 20, 2010 11:13 amby Holmz
Scott@FP wrote:AWD cars don't always slip the same wheels every time, and there's really no true gnd speed reference as you pointed out. Entirely possible and fairly frequent to have all 4 wheels slipping at nearly the same rate, losing forward drive (loss of lat G)at lower speeds. AWD (fully differentiated, not progressive ala Nissan and Porsche)is more likely to slip the fronts first, but defining the fronts as Drv Spd still leaves a couple of holes in the strategy. It might work out OK, have to play with it some more, really only want to prevent one wheel from blowing off over bumps or at low speeds and briefly cut power to get it back in line. Usually what seems to happen is traction loss in one wheel leading to loss in another on the opposite axle.
Yup - You would NOT want a ground speed that is based on the wheel speed...
This leaves some math work... (usually accelerometers with occasional GPS and/or wheel speed inputs)
You now have me thinking about putting a wheel speed sensor on my test vehicle.

Re: Definition of Drive, Ground Speed and multiple inputs
Posted:
Fri Oct 22, 2010 4:51 amby Scott@FP
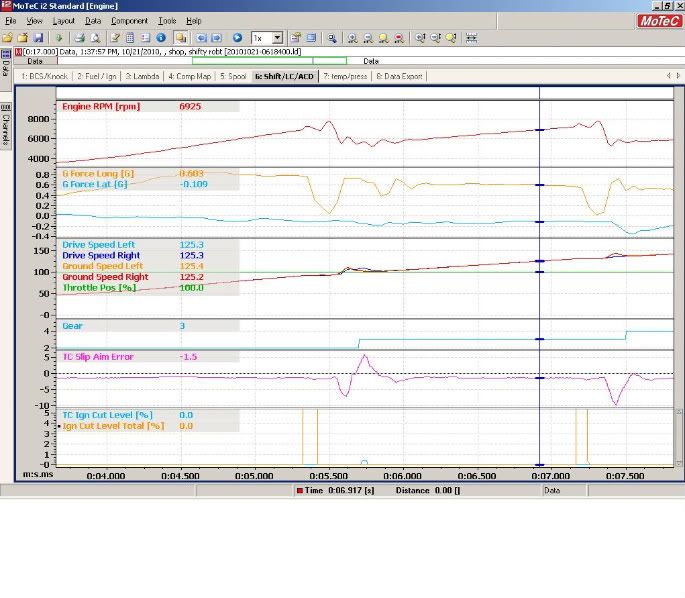
Here's an example, on the 2-3 shift (OEM synchro trans believe it or not) the fronts (drive speed) break loose enough to trip TC (the rears also broke loose first until chassis weight transfer, look at the TC Slip Error go negative), then on the 3-4 shift the rears (ground speed) break loose.